728x90
반응형
- 4.3.2절에서 우리는 x, y, z축을 중심으로 하는 세 종류의 회전을 소개했다.
- 이 장은 그러한 회전을 적절하게 결합하면 물체가 임의의 방향을 가지게 됨을 보여줄 것이다.
- 그 다음 주축이 아닌 임의의 축을 중심으로 물체를 회전하는 기법에 대해 기술할 것이다.
11.1 오일러 변환
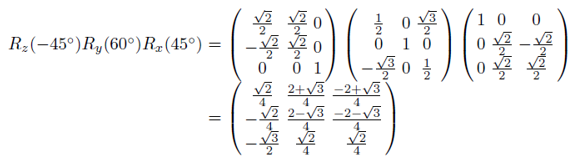
- 세 개의 주축 중심 회전을 결합한 것을 오일러 변환(Euler transform)이라 한다. 그런데, 이 주 축은 월드 공간에서 택할 수도 있고, 오브젝트 공간에서 택할 수도 있다.
11.1.1 월드 공간 오일러 변환


11.2 키프레임 애니메이션과 오일러 변환
11.2.1 2차원 키프레임 애니메이션
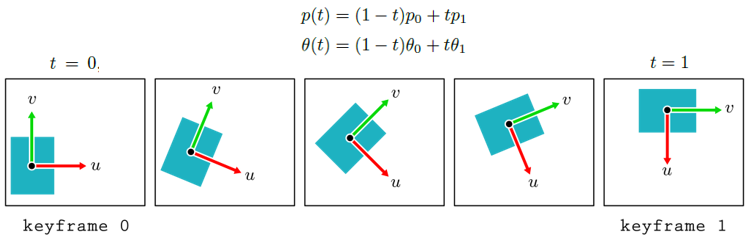
- p_i는 사각형 중심의 좌표를, ∂_i는 회전각 즉 방향을 나타낸다.
- 중간 프레임 t에서의 사각형의 위치는 위의 식과 같이 선형보간을 통해 결정된다.
- 사각형의 방향도 아래식과 같은 방식으로 선형보간된다.
11.2.2 3차원 키프레임 애니메이션
- 2차원 키프레임 애니메이션에서 소개한 개념은 3차원에 그대로 적용된다.

- 오른쪽 그래프는 x, y, z축 중심의 회전 각도를 보여주는데, 이는 바로 오일러 각이다.
- 좌측 열의 세 그래프는 이러한 오일러각 및 그 선형보간 결과를 보여준다.

- 앞서 나온 선형보간 대신 고차원 보간을 선택할 수도 있고 다음 그림과 같이 보간 곡선의 모양을 변경할 수도 있다.
11.2.3 오일러 각의 보간

- 물체의 방향을 정의하는 데 있어 오일러 각 (∂_x, ∂_y, ∂_z)는 매우 직관적인 수단을 제공한다.
- 하지만, 오일러 각이 가진 문제 중 하나는, 이것이 올바르게 보간된다는 보장이 없다는 사실이다.
- 가장 위에 있는 그림이 키프레임 0, 그 다음이 키프레임 1의 모습일 때, 이 둘을 선형보간하여 t = 0.5인 중간 프레임에서의 방향을 계산해 보면 그 결과는 (45˚, 67.5˚, 45˚)이다.
- 가장 밑의 그림은 이 오일러 각을 연속적으로 적용한 결과를 보여준다. 하지만, L자형 물체의 양 끝점의 x좌표를 보면 이들은 0이 아니다.
- 즉, 물체는 yz 평면에 놓여있지 않다. 두 키프레임의 물체가 yz평면에 놓여있기 때문에 중간 프레임의 물체도 그렇게 되어야 하는데, 오일러 각 보간은 예기치 않은 결과를 낳은 것이다.
- 이처럼 오일러 각은 올바르게 보간된다는 보장이 없기 때문에, 보간을 핵심 기능으로 가지는 키프레임 애니메이션에 적합하지 않다. 하지만, 쿼터니언(quaternion)은 항상 올바르게 보간된다.
출처
한정현 - [OpenGL ES를 이용한 3차원 컴퓨터 그래픽스 입문]을 보고 공부하고 정리한 내용입니다.
728x90
'공부 > Open GL ES를 이용한 3차원 컴퓨터 그래픽스 입문' 카테고리의 다른 글
| [Open GL ES를 이용한 3차원 컴퓨터 그래픽스 입문] 챕터 12 - 스크린 물체 조작 [1/2] (0) | 2022.03.16 |
|---|---|
| [Open GL ES를 이용한 3차원 컴퓨터 그래픽스 입문] 챕터 11 - 오일러 변환 및 쿼터니언 [2/2] (0) | 2022.03.11 |
| [Open GL ES를 이용한 3차원 컴퓨터 그래픽스 입문] 챕터 10 - 출력 병합기 (0) | 2022.03.05 |
| [Open GL ES를 이용한 3차원 컴퓨터 그래픽스 입문] 챕터 9 - 라이팅 (앰비언트, 발산광) [2/2] (0) | 2022.03.01 |
| [Open GL ES를 이용한 3차원 컴퓨터 그래픽스 입문] 챕터 9 - 라이팅 (디퓨즈, 스페큘러) [1/2] (0) | 2022.02.27 |



